
Li Peng
Intelligent Control and Robotics Laboratory, Department of Control Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
Huang Xinhan
Intelligent Control and Robotics Laboratory, Department of Control Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
Wang Min
Intelligent Control and Robotics Laboratory, Department of Control Science and Engineering, Huazhong University of Science and Technology, Wuhan 430074, China
Information Technology Journal
Year: 2009 | Volume: 8 | Issue: 3 | Page No.: 284-292







ABSTRACT
In this study, a new method of information fusion DSmT (Dezert-Smarandache Theory) which is extended from Bayesian Theory and Dempster-Shafer Theory (DST) is introduced to solve the problem of robot map building in an unknown dynamic environment. The grid map method is adopted and a sonar sensor mathematical model is constructed based on DSmT. Meanwhile a few of general basic belief assignment functions (gbbaf) are constructed to deal with the uncertain and imprecise, sometimes even high conflicting information obtained by sonar sensors with the application of hybrid DSm model in the system and consideration of characteristics of sonar sensors. At last, Pioneer II mobile robot is used to carry out experiments of map building. The 2D general basic belief assignment (gbba) maps are structured and then correlative 3D gbba maps are built by openGL. The comparison of created ichnography with the real map testified the validity of hybrid DSm model for fusing imprecise information and map building proposed by this research.
PDF Abstract XML References Citation
How to cite this article
Li Peng, Huang Xinhan and Wang Min, 2009. Robot Map Building in Unknown Dynamic Environment Based on Hybrid Dezert-Smarandache Model. Information Technology Journal, 8: 284-292.
DOI: 10.3923/itj.2009.284.292
URL: https://scialert.net/abstract/?doi=itj.2009.284.292
DOI: 10.3923/itj.2009.284.292
URL: https://scialert.net/abstract/?doi=itj.2009.284.292
INTRODUCTION
Efficient exploration of an entirely unknown dynamic environment is a great difficulty for intelligent mobile robots. Robots obtain information of unknown environment and build the environment map through their sensors such as sonar, laser, infrared, visual, etc. and sonar sensor, with its low price, convenient applicability and high efficiency of data processing, is usually adopted as the main sensor of robot.
In the past, experts usually used sonar sensors to get information of static environment and structured the static environment map (Meng et al., 2008; Quintero-Alvarez et al., 2007; Noykov and Roumenin, 2007; Yenilmez and Temeltas, 2007). These studies can fall into two subgroups. These are: (1) Grid based environment maps, (2) Object specification based maps. However most of these studies are concentrated on the first method. Due to the physical characteristics limitation of sonar sensors, the information offered by sonar often contains unbelievable errors. So, recently instead of sonar sensor, laser sensor which is more accurate becomes the main sensor for obtaining information. In Momotaz’s study, a novel method of integrating fuzzy logic (FL) and genetic algorithm (GA) has been presented to solve the simultaneous localization and mapping (SLAM) problem of mobile robots (Momotaz et al., 2008). Grisetti presents an approximate but highly efficient approach to mapping with Rao-Blackwellized particle filters (Grisetti et al., 2007). But if an excellent method can deal with the errors brought by sonar readings, sonar sensors not the expensive laser sensors can also be used to paint the environment maps.
Information fusion technology can perfectly solve this problem: imprecise environment information obtained from the entirely unknown environment and inaccurate, uncertain and even highly contradicted data acquired by sonar sensor. There are many good classical fusion methods, such as probability theory (Burgard et al., 1996), fuzzy theory (Zadeh, 1965), Dempster-Shafer Theory (DST) (Shafer, 1976). Premaratne et al. (2007) apply Dempster-Shafer theory for robot map building, but it is only for static situation. Hongjun (2008) proposes SLAM-SD, an extended SLAM method for mobile robot in semi-dynamic environments, in which the robot detects the pose change of the semi-dynamic objects and updates the environmental map, but this method is also not suitable for completely dynamic environment. Tanaka and Kondo (2007) develop an efficient map-matching scheme called incremental RANSAC to depict the surrounding information in dynamic environment, but the final map is also blurry with many interfere points. Though researchers make progress in static or dynamic environment map building, how to construct the model effectively and clearly in the unknown dynamic environment is still a difficult problem, it means the method must deal with highly conflicting information like sonar data effectively.
To solve mentioned difficulties, a brand new information fusion method DSmT (Dezert, 2002; Dezert et al., 2005) is introduced. The DSmT of plausible and paradoxical reasoning proposed by Dezert et al. (2005) in recent years can be considered as an extension of the classical DST but includes fundamental differences with the DST. DSmT allows to formally combine any type of independent sources of information represented in term of belief functions, but is mainly focused on the fusion of uncertain, highly conflicting and imprecise sources of evidence. DSmT is able to solve complex static or dynamic fusion problems beyond the limits of the DST framework. It provides powerful theoretical and practical tool for unknown dynamic environment exploration of mobile robots.
This study firstly constructs the robot communication architecture, then analysis the characteristics of sonar sensor and found a group of general basic belief assignment functions under the hybrid DSm model which is an evolving model of DSmT framework. At last, the experiment is carried out to prove the validity of the algorithm.
COMMUNICATION ARCHITECTURE
The communication architecture for mobile robot system to explore unknown environment is shown as Fig. 1.
In this system, robot obtains environment data by itself and transports the data to the monitoring center through radio network. The monitoring center fuses these data, constructs the environment model and then sends commands to the robot.
Each mobile robot consists of three hardware modules (communication network system, sensor system and engine system) and three software modules (communication module, localization module and motion control module).
When the system works, firstly the monitoring center performs the connection to the robot. After the connection is established, the robot runs the processing cycle which is shown as follows:
| • | Monitoring center sends command packets to robot through the connection and then robot carries out specified actions, such as avoiding obstacles, going to a point |
 | |
| Fig. 1: | Mobile robot communication architecture |
| • | Every 100 msec, localization module obtains robot’s position and pose, sensor system collects data from the sensors |
| • | Robot sends server information packets (SIPs) to monitoring center through communication module. The standard SIP contains the robot’s current position and estimates, current translational and rotational speeds, sonar reading updates, battery voltage, analog and digital I/O states and more |
| • | Once receives the data that sent from the robot, monitoring center creates the global map of environment and analysis robot’s pose. According to the result of analysis, monitoring center sends adjustment command to robot |
| • | Robot carries out the command of monitoring center and adjusts its pose. In the end, robot enters next cycle |
Multithreading synchronization technology is used to make the system work more efficiently. There are two threads, one is communication thread and the other one is the computation thread. These two threads work respectively, which improves the work efficiency well.
INFORMATION FUSION OF COMMUNICATION-BASED MOBILE ROBOT
Fusion algorithm: The Dezert-Smarandache Theory (DSmT) of plausible and paradoxical reasoning proposed by the researchers in recent years allows to formally combining any type of independent sources of information represented in term of belief functions. And it is mainly focused on the fusion of uncertain, highly conflicting and imprecise sources of evidence (Dezert and Smarandache, 2004). DSmT is able to solve complex static or dynamic fusion problems, specially when conflicts between sources become large and when the refinement of the frame of the problem under consideration, denoted Θ, becomes inaccessible because of the vague, relative and imprecise nature of elements of Θ.
Notion of hyper-power set DΘ: One of the cornerstones of the DSmT is the notion of hyper-power set. Let Θ = {θ1,…,θn} be a finite set (called frame) of n elements. The hyper-power set DΘ is defined as the set of all composite propositions built from elements of Θ with ∪ and ∩ noperators such that:
| • | Φ ,θ1,…,θn ε DΘ |
| • | If A,B ε DΘ, then A ∩ B ε DΘ and A ∪ B ε DΘ |
| • | No other elements belong to DΘ, except those obtained by using above rules |
Generalized belief functions: A map is defined from a general frame Θ m ( • ): DΘ → [0,1] associated to a given source, say B, of evidence as:
(1) |
The quantity m(A) is called the generalized basic belief assignment/mass (gbba) of A.
The generalized belief and plausibility functions are defined as:
(2) |
(3) |
The classic DSm rule for free-DSm model: For k independent uncertain and paradoxical sources of information providing generalized basic belief assignment mi ( • ) over DΘ, the classical DSm conjunctive rule of combination ![]() is given by:
is given by:
(4) |
![]() by definition, unless otherwise specified in special cases when some source assigns a non-zero value to it.
by definition, unless otherwise specified in special cases when some source assigns a non-zero value to it.
Dsm rule of combination for hybrid DSm model: Hybrid DSm model is a recombination of free-DSm model rules with some constraints (Dezert and Smarandache, 2006). The formula of hybrid DSm rule of combination can be generalized in the following way for all AεDΘ:
(5) |
(6) |
 | (7) |
(8) |
where, It = θ1 ∪ θ2 ∪ … ∪ θn.
The first sum S1 (A) entering in the formula corresponds to mass ![]() obtained by the classic DSm rule of combination for k sources of information based on the free-DSm model Mf.
obtained by the classic DSm rule of combination for k sources of information based on the free-DSm model Mf.
The conflict among the sets Xi can be directly generalized for k2 sources as follows:
(9) |
The conflict mass must be distributed. Here, PCR2 (Proportional Conflict Redistribution rule 2) is applied to distribute the mass. The PCR2 formula for k ≥ 2 sources is:
(10) |
Where:
![]()
In this formula, ![]() is the non-zero sum of the column of X in the mass matrix, k12…s is the total conflicting mass and e12…s is the sum of all non-zero column sums of all non-empty sets involved in the conflict.
is the non-zero sum of the column of X in the mass matrix, k12…s is the total conflicting mass and e12…s is the sum of all non-zero column sums of all non-empty sets involved in the conflict.
MODEL OF SONAR SENSOR BASED ON DSmT
The simple principle of sonar sensor is: it generates sheaves of cone-shaped wave to detect the objects. The wave will be reflected as soon as it encounters an object.
Since the sound wave generated by sonar sensor spreads forwards in the form of loudspeaker, there exists a divergence angle. Any object among the fan-shaped can reflect the wave, so the real position of the objects detected among the fan-shaped area cannot be cannot clearly known. And there are many other environment influences, so the data obtained by sonar sensor is not accurate. The typical beam pattern of sonar is show as Fig. 2. It is shown clearly that the beam angle of sonar ultrasonic is 15 degrees, which has been proved in present experiments. The range of sonar readings is from 10 cm to nearly 5 m.
According to characteristics of sonar sensor, construct a model of sonar sensor (Fig. 3) based on DSmT to solve the problem. Suppose, there are two elements θ1 and θ2 in the frame of discernment Θ.
θ1 means the grid in map is empty, θ2 means occupied by some objects, θ1 ∩ θ2 means the grid cannot be clearly ascribed to empty state or occupied state, it is the conflict mass generated by the computation of information fusion and θ1 ∪ θ2 means that information about the grid is unknown. The hyper-power set of the discernment frame Θ is DΘ ={Φ ,θ1 ∩ θ2,θ1,θ2,θ1 ∪ θ2}.
 | |
| Fig. 2: | Typical beam pattern of sonar on robot at 50 kHz |
 | |
| Fig. 3: | Sonar model based on DSmT |
Then m (θ1) denotes the general basic belief assignment functions (gbbaf) for the empty status, define m(θ2) as the gbbaf for occupied status, m(θ1∩ θ2) is considered as the gbbaf of conflict mass and m (θ1 ∪ θ2) is defined as the gbbaf of unknown status (it mainly refers to those areas that still not be scanned at present).
The belief assignments m ( • ):DΘ → [0,1] are constructed by researchers such as the formulas 11-16 according to the sonar based on DSmT:
(11) |
(12) |
(13) |
(14) |
Where:
(15) |
(16) |
The Eq. 16 is given by Dezert et al. (2005). Here, Rmin is the minimum sonar reading that sonar can obtain. R is the sonar reading between sonar and object. d is the distance from sonar to the point (x,y) in the map. ω is the divergence angle defined as 15 degrees. θ is the angle between d and axis. ε is the error of sonar reading. ρE , ρO, ρC and ρ1 are the environmental adjustment coefficients. Here, let ρE = 0.35, ρO = 0.1, ρC = 80 and ρ1 = 10.
Then experiments of sonar reading errors are carried out to analyze the of the mathematical sonar model. The results are shown in Table 1. An object is placed in front of a fixed sonar sensor to survey the sonar readings. Twenty sonar readings are recorded every 500 mm. The distance between object and sonar sensor is from 500 to 4000 mm. It is distinctly shown in Table 1, in the range of 3000 mm, the sonar readings are much more accurate than those out the range of 3000 mm. All errors in the range of 3000 mm are under 0.5%. So, define the valid maximum R is 3000 mm and ε equals 0.5%xR.
| Table 1: | Experimental sonar readings at different distances and relevant analysis |
 | |
 | |
| Fig. 4: | m(.) of Eq.(11~14) when R = 1.5 m |
The analysis on the characteristics of gbbaf are shown as Fig. 4, when R = 1.5 m. Consider the working principle of sonar, the closer to the location of sonar reading, the greater the possibility of being occupied. So, the gbba of m (θ2) near the sonar reading is much greater than any other places. In other words, the grid R near is probably occupied by some objects. But the gbba of m (θ2) is opposite. In the area near R the gbba of m (θ2) almost becomes zero and in the sonar range, the farther away from R the greater the possibility of being empty. The conflicting mass m (θ1 ∩ θ2) is an uncertain part generated in the application of using hybrid DSm rules, it cannot be clearly ascribed to m (θ1) or m (θ2) and becomes greatest in the intersection of m (θ1) and m (θ2). At last, the gbba of m (θ1 ∪ θ2) becomes large in the areas beyond sonar range.
 | |
| Fig. 5: | Robot structure |
EXPERIMENTAL RESULTS AND ANALYSIS
A user interface as a software platform for experiment is developed by us with Visual Studio 2008. The Pioneer II mobile robot which is used in experiments has 16 sonar sensors fixed around it. Robot’s structure is shown as Fig. 5 and the distribution of sonar sensors is shown in Fig. 6.
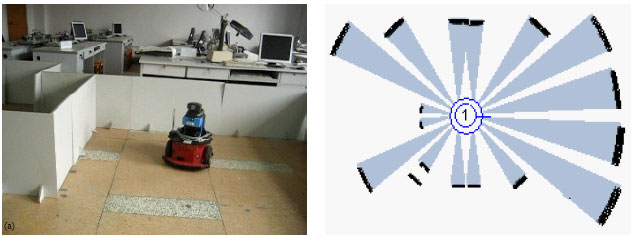
First of all, an experiment field (size: 4840x3100 mm) is created as Fig. 7a and the real world of experiment is as Fig. 7b. The initial position of multiple robots is shown in Fig. 8. The point of robot I is treated as the coordinate origin of the global map. So, robot is set to the pose of (0,0,0°). The third parameter is the deflection angle of robot.
Fusion steps: The data is fused in the monitoring center. Before exploring the environment, suppose the map is entirely unknown, that means m (θ1 ∪ θ2) =1 for each grid and m (θ1) = m (θ2) = m (θ1∩ θ2)= 0. The fusion steps are as follows:
 | |
| Fig. 6: | Distribution of front sonar sensors |
 | |
 | |
| Fig. 7: | (a) Initial positions of robot and (b) Real world of experiment |
 | |
| Fig. 8: | Grid information fusion |
| • | Robot begins to explore the dynamic environment and send data to monitoring center. Assume at time t, monitoring center has calculated the gbba |
| • | Then at time t+1 (the moment next to the time t), through Eq. 11-16, monitoring center calculates the gbba m (θ1), m (θ2), m (θ1∩ θ2) and m (θ1 ∪ θ2) for the grid which is being detected at that moment |
| • | Apply the arithmetic of restrict spreading to fuse the information in the fan-shaped areas through combination rules of hybrid DSm model and obtain new gbba values |
| • | Redistribute the conflict mass |
| • | Update map data |
The flow chart of fusion steps is shown in Fig. 8.
Experimental results: In the experiment, a person walks in the field all the time to represent the dynamic factor.
The demonstration of dynamic map building is shown in Fig. 9. Pictures on the left side are photos of real world and figures on other side are the corresponding maps built by monitoring center. Figure 9a is the beginning of this experiment, no body is in the field. The sectors in the right picture are the districts scanning by corresponding sonar sensors. Then the robot walks itself while a person moves beside it. In Figure 9b-d, it is shown that the moving person is detected by sonar sensors of the robot. The locations of the moving person are marked by circles. Obviously, the map is dynamically updated in time. That is to say, if the person stands at location A, the grid of this location is marked as occupied status on the map, but when the person moves to another location B, instead of occupied status the grid of A will marked as empty status, at the same time grid of B will be marked as occupied status.
 | |
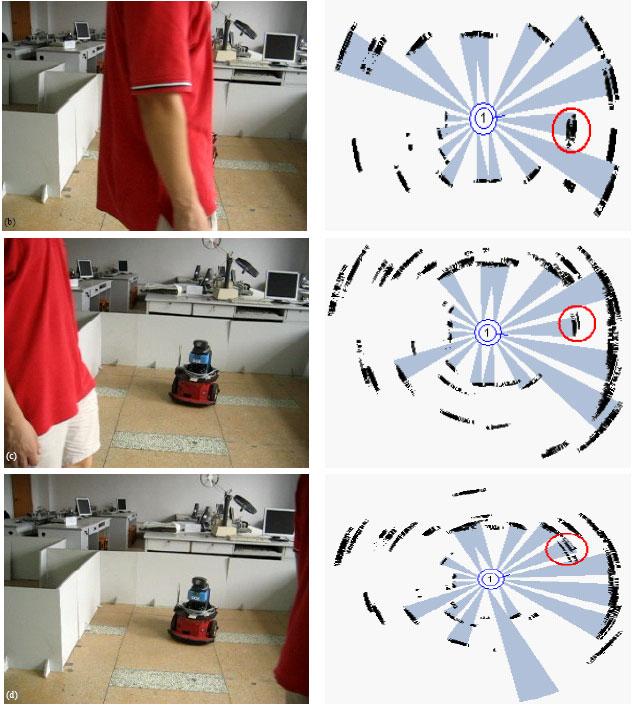 | |
| Fig. 9: | Dynamic map building. (a) Nobody in the field and (b-d) Moving person is detected by sonar sensors |
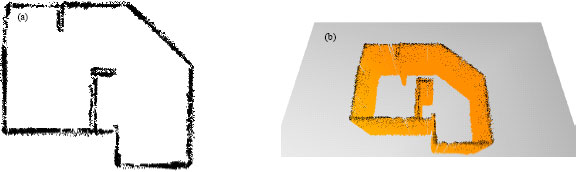 | |
| Fig. 10: | Final experimental results. (a) 2D gbba final map and (b) 3D gbba final map built by openGL |
The final experimental results are in Fig. 10. In Fig. 10a, the grayscale of the grid point reflects the gbba. The grayscale is calculated as (1-gbba)x255. Figure 10b is the 3D final gbba final map created by openGL. The grid gbba value is denoted by the height of line. In order to be observed conveniently, the end of gbba line is colored black.
Analysis: DSmT can be applied to build an accurate map though the data obtained by sonar sensors is imprecise and uncertain even high conflicting. Furthermore, hybrid DSm model under DSmT framework can deal with the dynamic situation well. In dynamically unknown environment, dynamic factors can be filtrated and the map can be updated in time. Outline of objects and location are expressed clearly.
| • | As a result of multithreading synchronization technology, the system works without delay even breakdown |
| • | Monitoring center can fuse information with high efficiency. Because of the application of DSmT, the fusion avoids the relatively complex division andonly refers to simple addition and multiplication. And the arithmetic of restrict spreading makes us only need to update a small part of the map in one communication cycle |
| • | From Fig. 10b, it is shown that some lines which denote gbba of the grid are shorter than others. It means these grids still can not be affirmed affirmatively. Though there are only a little of this kind grid, they make the 3D gbba map not flat. So, some algorithms can be applied to filter these girds |
CONCLUSION
In this study, with the application of hybrid DSm model under DSmT framework, a group of gbbaf formulas is proposed for sonar sensor fixed on mobile robot. Also the hybrid DSm model is applied to mobile robot map building in an unknown dynamic real environment. Through the experiment, hybrid DSm model under DSmT framework is proved to be a valid method, especially for fusing imprecise, uncertain even high conflicting information and building map accurately. To apply hybrid DSm model to multiple mobile robots system in dynamic environment and find a valid algorithm to flat the 3D gbba map are the future study.
ACKNOWLEDGMENT
This study is supported by the National Science Foundation of China under grant No. 60675028, this is greatly acknowledged.
REFERENCES
- Dezert, J., 2002. Foundations for a new theory of plausible and paradoxical reasoning. Inform. Secur., 91: 13-57.
Direct Link - Dezert, J. and F. Smarandache, 2004. Advances and Applications of DSmT for Information Fusion (Collected Works). 1st Edn., American Research Press, Rehoboth, New Mexico, USA., ISBN: 1-931233-82-9.
Direct Link - Dezert, J. and F. Smarandache, 2006. Advances and Applications of DSmT for Information Fusion (Collected Works). 2nd Edn., American Research Press, Rehoboth, New Mexico, USA., ISBN: 1-59973-000-6.
Direct Link - Dezert, J., A. Tchamova and T. Semerdjiev, 2005. Performance evaluation of fusion rules for multitarget tracking in clutter based on generalized data association. Procceedings of the 8th International Conference on Information Fusion, July 25-28, 2005, ONERA-DTIM-IED, Chatillon, France, Philadelphia, USA, pp: 8-8.
Direct Link - Grisetti, G., G.D. Tipaldi, C. Stachniss, W. Burgard and D. Nardi, 2007. Fast and accurate SLAM with Rao-Blackwellized particle filters. Rob. Auton. Syst., 55: 30-38.
CrossRefDirect Link - Hongjun, Z., 2008. Localizing objects during robot SLAM in semi-dynamic environments. Proceedings of the International Conference on Advanced Intelligent Mechatronics, Xian, China, July 2-5, 2008, Tokyo Metropolitan Ind. Technol. Res. Inst., pp: 595-601.
Direct Link - Wang, M. and J.N.K. Liu, 2008. Fuzzy logic-based real-time robot navigation in unknown environment with dead ends. Rob. Autom. Syst., 56: 625-643.
CrossRefDirect Link - Momotaz, B., K.I. Mann George and G. Gosine Raymond, 2008. Integrated fuzzy logic and genetic algorithmic approach for simultaneous localization and mapping of mobile robots. Applied Soft Comput. J., 8: 150-165.
CrossRefDirect Link - Noykov, S. and C. Roumenin, 2007. Occupancy grids building by sonar and mobile robot. Robotics Autonomous Syst., 55: 162-175.
CrossRefDirect Link - Premaratne, K., D.A. Dewasurendra and P.H. Bauer, 2007. Evidence combination in an environment with heterogeneous sources. IEEE Trans. Syst. Man Cybernetics Part A Syst. Humans, 37: 298-309.
CrossRef - Quintero-Alvarez, P., G. Ramirez and S. Zeghloul, 2007. A collision-free path-planning method for an articulated mobile robot. Applied Bionics Biomech., 4: 71-81.
CrossRef - Tanaka, K. and E. Kondo, 2007. Mobile robot mapping with geometrically inconsistent measurements in dynamic environments. Proceedings of the SICE Annual Conference, September 17-20, 2007, Takamatsu, Japan, pp: 1493-1500.
CrossRef - Yenilmez, L. and H. Temeltas, 2007. A new approach to map building by sensor data fusion: Sequential principal component-SPC method. Int. J. Adv. Manufact. Technol., 34: 168-178.
CrossRef