
Hui Chen
School of Electrical and Information Engineering, Lanzhou University of Technology, Lanzhou, Gansu, 730050, China
Feng Lian
School of Electronic and Information Engineering, Xi`an Jiaotong University, Xi�an, Shanxi, 710049, China
Information Technology Journal
Year: 2014 | Volume: 13 | Issue: 11 | Page No.: 1848-1852







ABSTRACT
When several targets have been detected by radar in the same wave gate, their measurement errors are correlated significantly. In this study, the discussed approaches registers the sensor bias and correct the radar measurement error of non-cooperation target by utilizing the high precision GPS measurements of the coexistent target and the strong correlation assumption among the radar measurements. The simulation results show that the precision of the target state estimation based on the bias compensation and the error correction in this study is significantly improved.
PDF Abstract XML References Citation
Received: June 01, 2013;
Accepted: August 03, 2013;
Published: April 18, 2014
How to cite this article
Hui Chen and Feng Lian, 2014. Error Correction Algorithm Based on Certain Correlation Assumption. Information Technology Journal, 13: 1848-1852.
DOI: 10.3923/itj.2014.1848.1852
URL: https://scialert.net/abstract/?doi=itj.2014.1848.1852
DOI: 10.3923/itj.2014.1848.1852
URL: https://scialert.net/abstract/?doi=itj.2014.1848.1852
INTRODUCTION
In real application, the foreseeable correlations among the target measurements exist and they are often neglected. Obviously, they might be taken full advantage to improve the state estimation. In this study, the discussed approach researches an enemy maneuvering target tracking with a coexistent interceptor target which has high accuracy GPS measurement in the terminal guidance phase. When the distance between the two targets is short, this study assumes that radar can detect the enemy target and the interceptor target in the same wave gate. Under this circumstance, their measurement noises have similar properties (Bar-Shalom and Li, 1995) which may be depicted as a strong correlation (Zhuang, 2005; Han et al., 2007). The study Han et al. (2007) already proposed a novel error correction algorithm based the certain assumption by using the GPS measurements of the coexistent interceptor. But in that study, the necessary theory analysis and the detailed simulation are not given. Moreover, the sensor bias compensation also is not involved in that study. This study researches the bias compensation algorithm and gives the detail of the error transfer algorithm as a supplement. The same as the assumption by Han et al. (2007), the radar system error may be corrected by virtue of the GPS measurements of the coexistent interceptor target and then the enemy target state estimation is improved. By the detailed simulation, the target state estimation after the related bias compensation and radar measurement corrected is significantly improved.
STUDIED SCENE AND TARGET MODEL
For convenience sake, this study assumes that two coexistent targets are in the scene. Depict these two targets that target 1 has GPS measurement of meter grade (Wang, 2003) whose measurement accuracy is far higher than that of the radar. Target 1 and target 2 can be detected in the same wave gate of the radar. Moreover, make assumption that the radar measurement precision reaches hectometre grade. The radar measurements of target 1 and target 2 can be obtained at every sampling time. The state of target i (i = 1, 2) at time-step k is:
| (1) |
In consideration of the existing system bias and the measurement error of the radar, all measurements of target 1 and target 2 from radar is Han et al. (2007):
 | (2) |
Where:
| • | |
| • | |
| • | b = [br, bθ, bn]T is the system bias vector of the radar which usually is a constant (Herrero et al., 2007) with the assumption that all biases of target measurements from a radar is same. Furthermore, this study assumes that the position and orientation bias of the radar platform aren’t existing (Lin and Bar-Shalom, 2006) |
| • |
For the sake of the strong correlation between the measurement errors in the same wave gate of the radar, this study makes use of this strong correlation to correct the measurements of target 2 on the basis of the GPS measurements of target 1.
This study makes the assumption that the associations between the target and the measurement are right and false alarms are neglected. The origin of the coordinate plane is the radar station.
BIAS COMPENSATION
First, this study takes advantage of the GPS measurements of the coexistent target 1 to estimate the system bias b. There are some estimating algorithms of the system bias, for example, the Kalman Filter (KF) (Herrero et al., 2007; Lin and Bar-Shalom, 2006), LS (Least Squares) (Zhou et al., 1999), Maximum Likelihood (ML) (Okello and Ristic, 2003), etc. The bias is modeled as:
| (3) |
where, ![]() is the transformed GPS measurement vector in spherical coordinates. The process noise of the bias:
is the transformed GPS measurement vector in spherical coordinates. The process noise of the bias:
wbk-1~N(0, Qbk-1)
where, Qbk is the noise variance and it is usually rather small (Lin and Bar-Shalom, 2006). With the aid of KF filter, the system bias estimation ![]() and the relevant bias covariance matrix Rbk can be obtained.
and the relevant bias covariance matrix Rbk can be obtained.
ERROR TRANSFER ALGORITHM
The estimation of the radar measurement error of target 1 is corrected based on its GPS measurement by Eq. 2. Then the radar measurement noise of target 1 can be obtained at time-step k as:
| (4) |
where, the GPS measurement error is neglected. The corrected radar measurement of target 2 based on the error transfer algorithm is presented as follow:
Assume that the strong correlation between target 1 and target 2 in the same wave gate of the radar satisfies:
| (5) |
where, ρk is the correlation matrix at time-step k and εk~N(0, Rεk) is random error. Assume that ρr,k, ρθ,k and ρn,k are the correlation coefficient of r, θ and φ, respectively. Moreover, r, θ and φ are uncorrelated. Then:
| (6) |
On the basis of Eq. 5, the following can be obtained:
| (7) |
Where:
| (8) |
The correlation coefficients of r, θ, φ are usually expressed as empirical equations:
 | (9) |
For the sake of the lack of the real distance and the angle of the target, this study approximates the correlation coefficient based on actual radar measurement vector ![]() . By analyzing Eq. 9, the closer the distance between targets is, the larger the correlation coefficient is. And when the values of
. By analyzing Eq. 9, the closer the distance between targets is, the larger the correlation coefficient is. And when the values of ![]() are close to zero, ρk is close to identity matrix I3x3. Furthermore, the covariance Rεk of the random error εk is close to 03x3. It represents that, the radar measurements of target 1 and target 2 are same. When the values of
are close to zero, ρk is close to identity matrix I3x3. Furthermore, the covariance Rεk of the random error εk is close to 03x3. It represents that, the radar measurements of target 1 and target 2 are same. When the values of ![]() are close to ∞, ρk is close to 03x3 and Rεk is close to Rk which is the measurement variance of the radar. It represents that, the radar measurements noises of the two targets are fully independent. This is more coincident with the actual circs.
are close to ∞, ρk is close to 03x3 and Rεk is close to Rk which is the measurement variance of the radar. It represents that, the radar measurements noises of the two targets are fully independent. This is more coincident with the actual circs.
Take expectation ![]() for the two sides of the Eq. 5. The radar measurement noise Vk(2) and its estimation
for the two sides of the Eq. 5. The radar measurement noise Vk(2) and its estimation ![]() of target 2 can be obtained as:
of target 2 can be obtained as:
| (10) |
Then, the eventual result of the radar measurement corrector ![]() is:
is:
| (11) |
Its error covariance matrix is:
| (12) |
The radar measurement corrector of Eq. 11 and 12 are in spherical coordinates. Transform them into Cartesian coordinates where they are ![]() and
and ![]() , respectively.
, respectively.
STATE ESTIMATION OF TARGET 2
The corrected radar measurement of target 2 has no correlation with its historic measurement, so this study can use KF to estimate the state of target 2. Its state equation and measurement equation are:
| (13) |
| • | xk(2) is the state vector of target 2 |
| • | w(2)k-1 is the process noise of target 2 and w(2)k-1~N(0, Q(2)k-1) |
| • |
SIMULATION ANALYSIS
Simulation scene description and the comparison of the different algorithms: This study gives an example of the target interception shown as Fig. 1 in the north-eastern-up coordinates whose origin is the launch site of the interceptor. The radar is located at (-100, 100, 0) km. The initial position and initial velocity of the aim are (340, -1, 140) km and (-2.3, -1, -0.4) km sec-1 in Cartesian coordinates, respectively. The aim moves on the basis of the loading model movement trajectory (Farina et al., 2002) and trajectory coefficient is 4x104. It is known that target 1 carry GPS and it can get the accurate GPS measurements. The radar located in ground can detects target 1 and target 2 at the same time and wave gate in the late intercept. The state of target 2 can be estimated on the basis of the presented algorithm in this study.
 | |
| Fig. 1: | Actual trajectories of the interceptor and aim target |
Assume that the measurement standard deviation σr = 100 m and σθ = σφ= 1 m rad. The system bias (br, bθ, bφ) = (50 m, -0.5 m rad, 0.5 m rad). This study adopts the parameters as Cr = -ln(0.9)/10. and Cθ = Cφ = -ln(0.9)/20.
Estimate the states of target 2 using following three approaches:
| • | Estimate the state of target 2 using the raw measurement of the radar |
| • | After registering the measurement of the radar, estimate the state of target 2 |
| • | After registration, this study adopts the correcting algorithm based on the strong correlation to correct the radar measurements of target 2. And then the states of target 2 are estimated using this corrected measurements based on KF filter |
where, the sampling time T = 1 sec and the time of the Monte Carlo simulation is 200. The system bias estimations of the radar including angle and distance are shown in Fig. 2. The root-mean-square error (RMSE) of the above three approach are shown in Fig. 3.
By analyzing Fig. 2, the higher accuracy can be obtained after using the registration algorithm in this study. The estimation accuracy of approach 1 for the state of target 2 is not high (300-350 m). By registration, the related estimation accuracy decreased to 200-250 m. So, the bias compensation (registration) is a very important process in the real system. But both approach 1 and approach 2 fail to consider the actual strong correlation. Approach 3 is an algorithm based on the correlation after registration. As shown in Fig. 3, the accuracy of the approach can be further decreased to 30-40 m when the correlation coefficient satisfies the assumption.
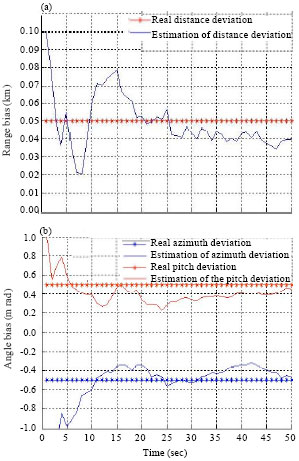 | |
| Fig. 2(a-b): | (a) Bias estimation of the distance for radar measurement and (b) Bias estimation of the angle for radar measurement |
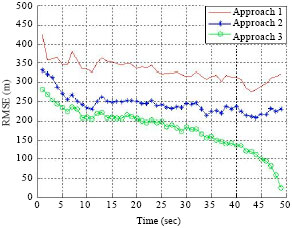 | |
| Fig. 3: | Root-mean-square error (RMSE) comparison of the three different approaches |
Thus, the state estimation of target 2 will be more trustworthy.
| Table 1: | Corrected error variance change with the correlation coefficient |
 | |
| ρ = correlation coefficient, Rk(2): Corrected measurement error covariance matrix of target 2, Rk: Measurement error covariance of radar, | |
Finally, this study shows that the corrected error variance change with the correlation coefficient and the spacing of the distance and the angle between the two targets under this coefficient shown as Table 1.
CONCLUSION
As far as shown in Table 1, when the distance between the two targets is far, the correlation coefficient is small (ρ<0.6). This course corresponds to 0-30 sec in Fig. 3. Obviously, the effect of the correcting algorithm is not prominent. At that time, KF is mainly used to estimate the states of target 2. When the distance between the two targets is close (for example, ![]() ,
, ![]() ,
, ![]() , the correlation coefficient is large (ρ>0.8). This course corresponds to the final 10 sec in Fig. 3. The effect of the correcting algorithm is good when Rk(2)<0.4Rk and the RMSE is less than 150. This effect will become more pronounced with the nearer distance. It is noted that the estimation accuracy is close to 30-40 m. So, this correcting algorithm is appropriate for the targets with formation flight or the target group in the terminal guidance phase.
, the correlation coefficient is large (ρ>0.8). This course corresponds to the final 10 sec in Fig. 3. The effect of the correcting algorithm is good when Rk(2)<0.4Rk and the RMSE is less than 150. This effect will become more pronounced with the nearer distance. It is noted that the estimation accuracy is close to 30-40 m. So, this correcting algorithm is appropriate for the targets with formation flight or the target group in the terminal guidance phase.
When the radar detects some targets in the same wave gate, this study may take full advantage of the coexistent target which has high measurement such GPS and take full advantage of the strong correlation among the radar measurements. After using the bias compensation and the error transfer algorithm, the state estimation of the concerned target will be dramaticlly improved. The application of the proposed in this study in a simulation system proves its effectiveness.
ACKNOWLEDGMENTS
This work is supported by the National Natural Science Foundation of China (Grant No. 61004087 and No. 61005026) and the fund for excellent young teachers in Lanzhou University of Technology (Grant No. Q201003).
REFERENCES
- Herrero, J.G., J.A.B. Portas and J.R.C. Corredera, 2007. On-line multi-sensor registration for data fusion on airport surface. IEEE Trans. Aerospace Electron. Syst., 43: 356-370.
CrossRef - Lin, X. and Y. Bar-Shalom, 2006. Multisensor target tracking performance with bias compensation. IEEE Trans. Aerospace Electron. Syst., 42: 1139-1149.
CrossRef - Zhou, Y., H. Leung and M. Blanchette, 1999. Sensor alignment with Earth-Centered Earth-Fixed (ECEF) coordinate system. IEEE Trans. Aerospace Electron. Syst., 35: 410-418.
CrossRef - Okello, N. and B. Ristic, 2003. Maximum likelihood registration for multiple dissimilar sensors. IEEE Trans. Aerospace Electron. Syst., 39: 1074-1083.
CrossRef - Farina, A., B. Ristic and D. Benvenuti, 2002. Tracking a ballistic target: Comparison of several nonlinear filters. IEEE Trans. Aerospace Electron. Syst., 38: 854-867.
CrossRef